NeuroBot es un dispositivo de entrenamiento para la rehabilitación de personas con lesiones cerebrales ideado por el neuropsicólogo José María Torralba Muñoz con el objetivo de añadir a los métodos más convencionales un plus motivacional y de mejora de la atención implicando actividades motoras en el proceso rehabilitador.
La idea base consiste en conducir NeuroBot a lo largo de un recorrido manejándolo con un mando a distancia pero imponiendo a su control ciertas dificultades al proceso de toma de decisiones por parte de la persona con DCA. En las primeras versiones, los parámetros controlados son sólo la velocidad y la dirección (cuando se pulsa sobre girar a la derecha el vehículo gira a la izquierda y viceversa) pero ya existe en prototipo una plataforma genérica que permite implementar diferentes dificultades que impliquen otras actividades motoras en la toma de decisiones.
Además de por su dimensión tecnológica, el proyecto me interesó porque se quería desarrollar como software libre y hardware libre así como facilitar su fabricación casera, al estilo DIY del movimiento Maker, para hacerlo llegar a cualquiera que lo necesitara. En el proceso, una de las sorpresas más agradables ha sido conocido a Createc, auténtico referente maker en Granada además de centro pionero en la impresión 3D.
![]()

Cuando conocí el proyecto ya existían dos versiones operativas y probadas (llamadas primero Cerebrot y posteriormente NeuroBot) desarrolladas con el soporte del equipo del departamento de electrónica del IES Virgen de las Nieves dirigido por Federico Coca y que servían de base para acometer una línea de trabajo ya estable y con muchas garantías de éxito.
Además de por ser un proyecto de hardware libre y software libre, me interesó colaborar en el desarrollo porque me parecía que encajaba muy bien con mi perfil profesional por su dimensión electrónica, de programación y de diseño de productos en 3D; además de implicar un campo tan apasionante como la psicología y destinarse a un fin social como la ayuda a la recuperación de personas con daño cerebral adquirido (DCA).
Para la parte electrónica se eligió usar placas Arduino, que son muy económicas y fáciles de conseguir además de contar con infinidad de módulos, también muy baratos y sencillos de conectar y programar incluso por personas sin conocimientos específicos.
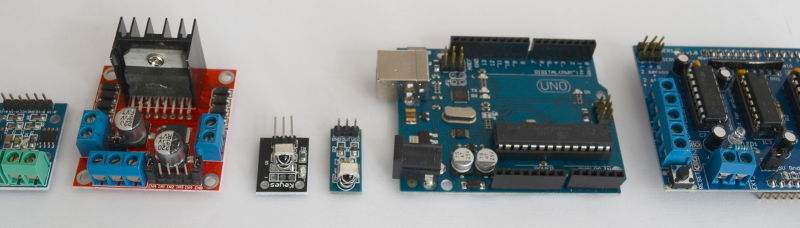
El controlador más sencillo de adquirir es un mando a distancia universal por infrarrojos, aunque es fácil extrapolar la idea de funcionamiento a otros tipos de comunicaciones, Bluetooth, por ejemplo, con la que ya hemos fabricado prototipos para la plataforma genérica de control.
Los dispositivos desarrollados antes del actual NeuroBot sugerían que el tamaño debía ser de unos 200 mm para poder ser apreciado cómodamente por el usuario y tener una forma que impidiera la ambigüedad a la hora de discriminar la dirección del movimiento. Para cumplir la segunda especificación lo más obvio era darle forma de flecha y eliminar cualquier elemento externo que pudiera distraer. La primera especificación podía ser satisfecha en una impresora 3D de tamaño convencional o en un panel de tamaño ISO A4 (para elaborarlo en 2D) usando unas medidas de 180 mm para asegurar que los márgenes no representaran un problema al imprimir o al cortar.
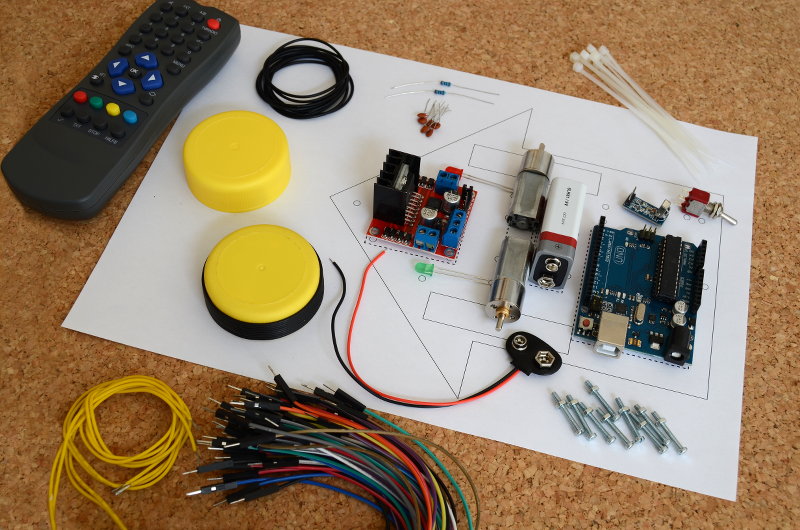
En el artículo sobre los componentes del vehículo se detallan las partes necesarias para fabricar el dispositivo de ayuda a la rehabilitación del DCA, la entrada de los modelos 2D y 3D y montaje del vehículo contiene una serie de pasos a seguir para construirlo y en la entrada que explica el software para Arduino con el que controlar el vehículo de ayuda a la rehabilitación del DCA se puede descargar la aplicación y encontrar algunas ideas sobre como adaptarla a componentes alternativos o realizar algunas mejoras.
Víctor Ventura
Desarrollando aplicaciones para la web conocí el potencial de internet de las cosas, encontré la excusa perfecta para satisfacer la inquietud de aprender electrónica que había tenido desde siempre. Ahora puedo darme el gusto de programar las cosas que yo mismo diseño y fabrico.
Sígueme:

Deja un comentario